



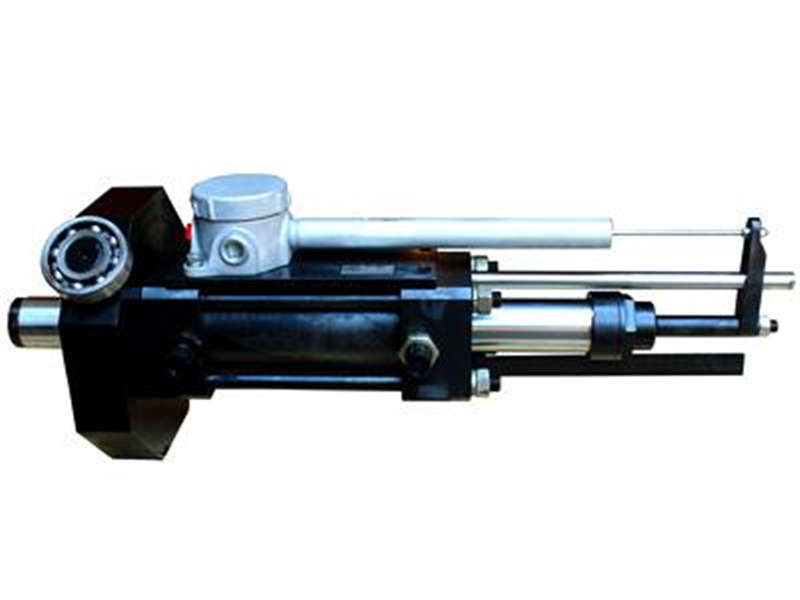
電液伺服控制油缸直線運動和液壓馬達(dá)旋轉(zhuǎn)運動與伺服電機通過絲杠實現(xiàn)直線運動和通過減速機實現(xiàn)旋轉(zhuǎn)運動是基本類似的,一般都是位置閉環(huán)控制系統(tǒng),那么用標(biāo)準(zhǔn)的伺服電機運動控制器來控制液壓油缸和液壓馬達(dá)會遇到哪些問題呢?首先很多油缸做成單出桿油缸是最經(jīng)濟合理的,這帶來了兩個方向系統(tǒng)速度增益系數(shù)不相同的問題,這在伺服電機控制中是不會考慮的。先進的電液伺服運動控制系統(tǒng)會考慮這個問題,直接調(diào)整雙向增益參數(shù)即可。二是液壓系統(tǒng)中流體的可壓縮性,特別是細(xì)長油缸和細(xì)長油路會使得液壓系統(tǒng)傳動剛性下降,極易形成低速爬行和振蕩。這就需要在控制參數(shù)里增加位置誤差的二階微分控制分量和更準(zhǔn)確的加速度實際值的模型計算方式。這些功能也是電機伺服系統(tǒng)里不會考慮的。更快速的位置控制周期,程序執(zhí)行周期,也是先進的液壓伺服運動控制系統(tǒng)的標(biāo)配。這些伺服電機運動控制系統(tǒng)也不是必需的。
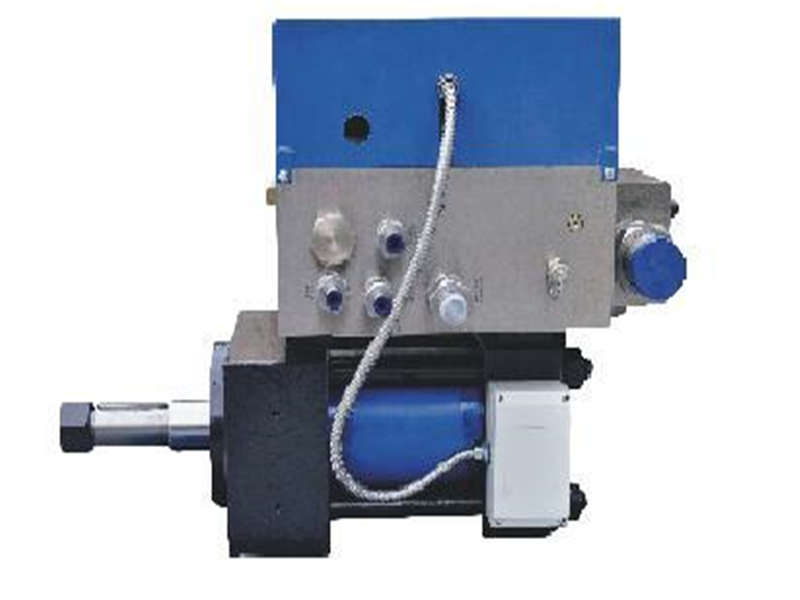
伺服油壓機通過伺服液壓泵組來驅(qū)動油缸進行上下壓裝作業(yè),組建的數(shù)控系統(tǒng)人機對話可實現(xiàn)根據(jù)客戶壓裝產(chǎn)品在組態(tài)觸摸屏中對產(chǎn)品的壓裝參數(shù)設(shè)定,能夠直觀查看產(chǎn)品的壓裝數(shù)據(jù),同時可以對壓裝產(chǎn)品進行在線壓裝檢測功能,設(shè)備具有快速下壓、壓裝、保壓與返回多段壓裝速度控制,使產(chǎn)品在壓裝過程中能有效地保證了產(chǎn)品壓裝的壓力精度與位移精度。每臺機器均安裝紅外線安全光柵,有效保護操作人員,伺服智能專利控制,確保機器重復(fù)定位精度可達(dá)±0.03mm,壓力誤差±1%。穩(wěn)定耐用:機架采用整機框架結(jié)構(gòu),滑塊采用精密導(dǎo)軌導(dǎo)向運行,耐震及抗側(cè)壓力強,整機穩(wěn)定,精密耐用,適用于落料、成型、擠壓等多種工 藝用途。故障率低:伺服智能專利控制系統(tǒng),不做無用功,油溫不易升高,且油路系統(tǒng)內(nèi)無負(fù)壓,較大降低了故障,延長液壓元件的使用壽命,電器 設(shè)有故障自動報警及一鍵復(fù)位功能。維修保養(yǎng)方便:由于取消了液壓系統(tǒng)中的比例伺服液壓閥、調(diào)速回路、調(diào)壓回路,液壓系統(tǒng)大大簡化。對液壓油的清潔度要求遠(yuǎn)遠(yuǎn)小于液壓比例伺服系統(tǒng),減少了液壓油污染對系統(tǒng)的影響。
控制原理:輸入裝置對系統(tǒng)發(fā)出輸入信號,使得液壓動力源提供的高壓油進入伺服閥后輸出給作動器。此時作動器發(fā)生動作并對試樣施加所需載荷。根據(jù)不同的控制方式反饋信號由相應(yīng)的傳感器測量,所測信號分別經(jīng)相應(yīng)的調(diào)節(jié)器放大,其輸出值控制變量的反饋值。根據(jù)試驗要求由函數(shù)發(fā)生器發(fā)出給定信號,然后在伺服控制器中對比給定信號和反饋信號,其差值經(jīng)過偏差放大器和伺服放大器放大后給予反饋,用以驅(qū)動伺服閥,調(diào)節(jié)伺服閥控制油量使作動器朝著消除偏差的方向運行,這就實現(xiàn)了系統(tǒng)的閉環(huán)控制。優(yōu)點:閉環(huán)回路伺服控制系統(tǒng)的優(yōu)點在于將先進的數(shù)字技術(shù)應(yīng)用于閉環(huán)回路中,把電子控制設(shè)備與微信息處理機制結(jié)合起來,能精確、有效地把編制的試驗程序用于材料試驗機系統(tǒng),確保控制參數(shù)與試驗程序的一致性,使試驗機能自如、快速、高精度地執(zhí)行指令,實現(xiàn)試驗條件的精確控制。